
HGUC ゼータガンダム その3
HGUC ゼータガンダム
@ 2017年4月26日
今日は「HGUC ゼータガンダム」の脚部の組み立てを行いました。

写真は「HGUC ゼータガンダム」の脚部のパーツです。
と、これは...。HGUCにしてはかなりの数のパーツが使われていますね。
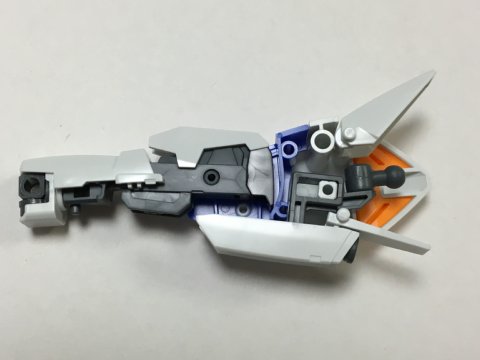
写真は脚の内部構造です。
これを見ると大腿部からヒザあたりまでは、フレームのような構造があるものの足首付近は外装パーツによりつながっています。
さて、この状態から...
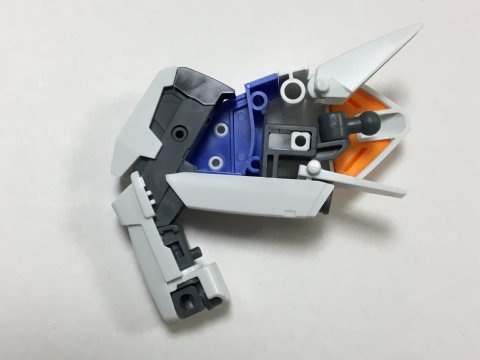
ヒザ関節は写真の位置まで可動します。
うーむ、可変機にしては曲がり方が少ないような気はするのは気のせいでしょうか...。

写真は足首付近のアップですが、足首のグレーのパーツは何やら四角いジョイントでつながっていて、若干の空間があります。この部分は...
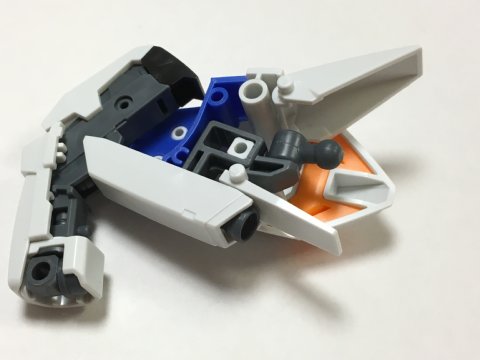
写真のように若干ですが、脚が伸縮するようになっています。
また、この動きと連動してバーニアが可動します。

ということで、脚部を全て組み立てると写真の状態になります。
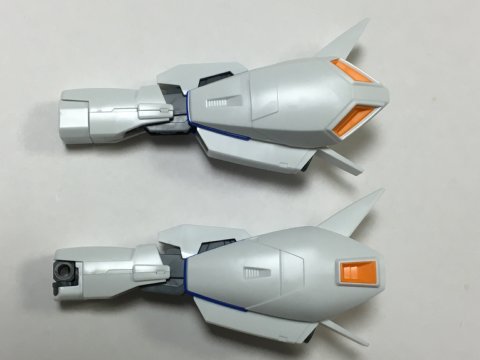
こちらは脚部を横から見たところです。
これを見ると、脚の外側と内側でバーニアの構成が非対称になっています。

写真はヒザを曲げたところです。
ヒザ下の黒いパーツがあるおかげて、ギリギリ関節のスキマが見えないようになっています。

さて、脚部に足先をドッキングすると、こんなカンジになりました!
スマートで角ばった形状は、いかにもゼータガンダムらしいですね。

まだ脚部だけですがポーズを付けてみました。
と、足首前方にアーマーがあるせいで、足首をほとんど前方に傾けることができません。
これだと立ち姿以外では、地面に立たせた状態でのポージングは難しいような気が...。
そういえば、取説の写真では立ち姿以外は、全てディスプレイスタンドを使っているようですが、最高の可動!というのはスタンド使用前提...みたいですね。
















Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
Anonymous (04/19)
tkt0314 (04/18)
スミ入れマーカー (04/18)
Anonymous (04/18)